Galatia Channel:Turner Mine Shale Member: Difference between revisions
Alan.Myers (talk | contribs) m (ILSTRAT moved page Galatia Channel:Stratigraphy/Turner Mine Shale Member to Galatia Channel:Turner Mine Shale Member without leaving a redirect) |
Alan.Myers (talk | contribs) No edit summary |
||
| Line 1: | Line 1: | ||
{{ | {{Infobox_links/Stratigraphy}} | ||
==Turner Mine Shale Member== | ==Turner Mine Shale Member== | ||
The Turner Mine Shale is the first marine bed to follow the Springfield Coal or the Dykersburg Shale, or both. It is black, fissile, and phosphatic and lies directly above the Springfield Coal throughout the Illinois Basin wherever the Dykersburg Member is absent. The Turner Mine also overlaps the Dykersburg ([[:File:C605-Figure-04.jpg|Figure 4]]). but typically pinches out where the Dykersburg reaches a thickness of 32.8 ft (10 m) or more. The Turner Mine averages about 3.3 ft (1 m) thick, ranging from less than 1 to 7.9 ft (0.3 to 2.4 m) thick. The Turner Mine is readily identified by very high readings on gamma-ray logs ([[:File:C605-Figure-05b.jpg|Figure 5]]) and low readings on density and neutron logs. | The Turner Mine Shale is the first marine bed to follow the Springfield Coal or the Dykersburg Shale, or both. It is black, fissile, and phosphatic and lies directly above the Springfield Coal throughout the Illinois Basin wherever the Dykersburg Member is absent. The Turner Mine also overlaps the Dykersburg ([[:File:C605-Figure-04.jpg|Figure 4]]). but typically pinches out where the Dykersburg reaches a thickness of 32.8 ft (10 m) or more. The Turner Mine averages about 3.3 ft (1 m) thick, ranging from less than 1 to 7.9 ft (0.3 to 2.4 m) thick. The Turner Mine is readily identified by very high readings on gamma-ray logs ([[:File:C605-Figure-05b.jpg|Figure 5]]) and low readings on density and neutron logs. | ||
Revision as of 20:06, 12 July 2020
Turner Mine Shale Member
The Turner Mine Shale is the first marine bed to follow the Springfield Coal or the Dykersburg Shale, or both. It is black, fissile, and phosphatic and lies directly above the Springfield Coal throughout the Illinois Basin wherever the Dykersburg Member is absent. The Turner Mine also overlaps the Dykersburg (Figure 4). but typically pinches out where the Dykersburg reaches a thickness of 32.8 ft (10 m) or more. The Turner Mine averages about 3.3 ft (1 m) thick, ranging from less than 1 to 7.9 ft (0.3 to 2.4 m) thick. The Turner Mine is readily identified by very high readings on gamma-ray logs (Figure 5) and low readings on density and neutron logs.
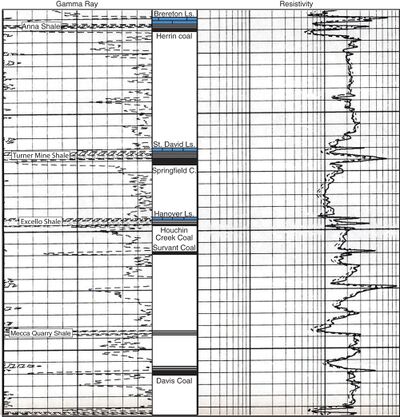 Figure 5b Wireline log illustrating the typical response of key units. (a) Electric log of Carter Oil No. 1 Beers well in sec. 28, T8S, R4E, Williamson County, Illinois (county no. 2107). B, Brereton Limestone; H, Herrin Coal; Sp, Springfield Coal; Han, Hanover Limestone; HC, Houchin Creek Coal; SV, Survant Coal; MQ, Mecca Quarry Shale; C, Colchester Coal. (b) Gamma-ray–resistivity log of Peabody Natural Gas No. 2 Short, in sec. 14, T7S, R7E, Hamilton County (county no. 25375).
Figure 5b Wireline log illustrating the typical response of key units. (a) Electric log of Carter Oil No. 1 Beers well in sec. 28, T8S, R4E, Williamson County, Illinois (county no. 2107). B, Brereton Limestone; H, Herrin Coal; Sp, Springfield Coal; Han, Hanover Limestone; HC, Houchin Creek Coal; SV, Survant Coal; MQ, Mecca Quarry Shale; C, Colchester Coal. (b) Gamma-ray–resistivity log of Peabody Natural Gas No. 2 Short, in sec. 14, T7S, R7E, Hamilton County (county no. 25375).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
The contact between the Turner Mine and Dykersburg Shale varies from rapidly gradational to erosive. Unfortunately, few mines exposing this contact have been active within the last 40 years. In the Eagle No. 2 underground mine in Gallatin County, Illinois, Dykersburg Shale occurred in lenses less than 23.6 in. (60 cm) thick, grading into overlying Turner Mine Shale. Evidently, this mine lay at the eastern depositional limit of the Dykersburg. At the Willow Lake Mine in Saline County, closer to the Galatia channel, lenses of Dykersburg were more numerous and ranged up to 3.3 ft (1 m) thick. Here, the contact was clearly erosive, with the Turner Mine lying against truncated bedding of the Dykersburg.
The gray, nonmarine Energy Shale Member that overlies the Herrin Coal near the contemporaneous Walshville channel is a close analogue to the Dykersburg Shale. The contact of the Energy Shale to the overlying black, phosphatic Anna Shale has been observed and mapped in large areas of several underground mines. This contact is sharply erosive, cutting off Energy Shale bedding at angles as steep as 20 degrees. The Energy Shale can be truncated from more than 16.4 ft (5 m) thick to zero in a lateral distance of 98.4 ft (30 m). Such erosion explains the highly irregular, lobate, and podlike distribution of gray shale as mapped in the mines (Bauer and DeMaris 1982; Nelson et al. 1987). Similar erosion evidently affected the Dykersburg prior to deposition of the Turner Mine Shale. The inferred origin of the Turner Mine Shale is essentially the same as that for the Excello Shale.
Primary Source
References